Dornier Do-32K
"Священный винт" | Поиски схемы | В арьергарде авиации | Первый советский | Уверенные шаги | На крыльях и винте | Вдоль или поперек ? | Воздушная кавалерия | Летающие вагоны | Крепкий орешек | Вертолет в рюкзаке | Верхом на пропеллере | "Вертолетный бум" | "Воздушные извозчики" | Винтокрылы | "Един в двух лицах" | Поворотное крыло | Сенсация в Ле-Бурже | "Монтажники" и "грузчики" | "Над седой равниной моря..." | Противотанковые | "Птеродактили" | "Малолитражки" | "Водоплавающие" | Винтокрылые роботы
Винтокрылые роботы
В 1869 году отставной поручик российской армии Александр Лодыгин (ставший впоследствии видным ученым и изобретателем) разработал проект "электролета" - летательного аппарата с несущим винтом, приводимым во вращение электродвигателем. Однако чиновники отказали автору в помощи по реализации проекта, сославшись на отсутствие средств и "чрезмерную новизну проекта". Так из-за бюрократической косности винтокрылый летательный аппарат задержался с появлением на свет почти на полвека.
Но идеи, как известно, обладают свойством возрождаться. В начала 30-х годов электрогеликоптерами занялся инженер-электрик Андраник Иосифьян (ставший впоследствии академиком АН Армянской ССР). Ему-то и довелось создать прототип современных вертолетов-роботов, точнее, дистанционно управляемых беспилотных вертолетов. В 1933-1935 годах Иосифьян совместно с инженером Б.Блиновым разработал и построил микровертолет весом всего 28кг. Этот беспилотный аппарат был оснащен соосным несущим винтом диаметром 1.8м, работавшим от электродвигателя, питание к которому подавалось по кабель-тросу от сети. Затем Иосифьян и Блинов создали аппарат с несущими винтами диаметром 6м, а в 1937 году испытали геликоплан-электровертолет с трехлопастным ротором диаметром 11м, поднимавший 70-80кг.
В 1941 году Иосифьян оснастил двумя электродвигателями вертолет ЦАГИ 5-ЭА. Длинный и гибкий бронированный кабель-трос позволил летчику-испытателю В.Карпову не только набирать приличную высоту, но и выполнять полеты по кругу. К сожалению, продолжению столь интересных работ помешала война.
К идее привязного вертолета конструкторы ряда стран вернулись спустя десятилетие. В середине 60-х годов итальянский инженер К.Марчетти, служивший экспертом французской автомобилестроительной компании "Ситроен", построил привязной геликоптер с соосными несущими винтами. Предназначался этот аппарат для метеонаблюдений и аэрофотосъемки.
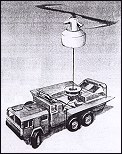
Dornier Do-32K |
Несколько позже подобный аппарат разработали конструкторы западногерманской фирмы Dornier. Созданный ими вертолет До-32К "Кибиц" мог поднимать до 85кг. Весьма любопытной была схема силовой установки "Кибица" - два турбокомпрессорных двигателя "холодного цикла" работали на несущий винт. Топливо подавалось к ним мощными насосами, установленными на трейлере, по 300-метровому шлангу. Антиобледенительное устройство обеспечивало полеты "Кибица" практически в любую погоду.
Скрупулезные расчеты и многочисленные испытания опытных образцов, проведенные за рубежом, показали, что с помощью беспилотных привязных вертолетов можно поднимать на высоту антенны, что позволяло увеличивать дальность радиосвязи на ультракоротких волнах, ретрансляционные устройства, вести наблюдение за местностью. Особо была оценена способность винтокрылых роботов проникать в зоны, зараженные боевыми отравляющими и радиоактивными веществами. При этом учитывалось, что миниатюрные аппараты довольно трудно обнаружить не только визуально, но и радиолокационными средствами.
Параллельно с привязными вертолетами некоторые зарубежные фирмы занимались разработкой аппаратов, управляемых по радио, которые могли бы совершать полеты по запрограммированному маршруту или менять скорость и высоту по командам с земли.
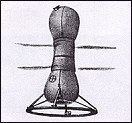
 Gyrodyne QH-50C |
Как правило, у привязных и радиоуправляемых вартолото схожи корпус, силовая установка, посадочные устройства и специальное оборудование -малогабаритные теле- и фотокамеры, лазерные системы и ретрансляционная аппаратура. Что же касается систем управления винтокрылыми роботами, то в отличие от пилотируемых машин на них подаются кодированные сигналы. Их принимает бортовая аппаратура и передает на исполнительные блоки, которые меняют угол атаки несущего винта и режим работы двигателя.
В начале 60-х годов американская фирма Gyrodyne разработала на базе микровертолета "Rotorcycle" винтокрылый робот QH-50D, несколько модификаций которого были приняты на вооружение военно-морским флотом США. Этот аппарат оснащался автопилотом, элактронной системой управления силовой установкой и двумя акустическими самонаводящимися торпедами Мк-44, предназначенными для борьбы с подводными лодками.
Демонстрационные полеты одной из модификаций робота, QН-55D, прошли в сентябре 1963 года довольно гладко. Аппарат послушно взлетал с палубы противолодочного корабля, сбрасывал торпеды в заданном районе и возвращался. Пентагон поспешил заказать большую партию роботов, но... вскоре военные убедились в том, что излишне поторопились - из 750 аппаратов, принятых флотом, 362 разбились из-за конструктивных дефектов, в частности, самопроизвольного отключения аппаратуры управления.
 Canadair CL-227 |
В 70-х годах канадская фирма Canadair выпустила дистанционно управляемый аппарат CL-89 и даже поставила несколько экземпляров коллегам по агрессивному блоку НАТО. Эти 156-килограммовые аппараты запускались с платформы, после набора высоты фотографировали местность (в том числе и ночью, в инфракрасном диапазоне) и спускались на парашюте в заданной точке. В дальнейшем эта фирма разработала вертолет-робот CL-227, причем одновременно в двух вариантах - с двигателем Ванкеля и турбовинтовой силовой установкой. Масса аппаратов составляла 130кг, скорость достигала 130км/ч, а благодаря экономичным двигателям вертолеты обоих вариантов могли держаться в воздухе по 2-3ч.
 Westland "Wisp" |
Английские инженеры компании Westland принялись за разработку вертолетов-роботов в 1968 году. Они задались целью опробовать на своих аппаратах компьютерные схемы стабилизации полета, что было необходимо для обеспечения качественной работы оптической разведывательной аппаратуры.
Спустя пять лет фирма продемонстрировала свой вертолет "Wisp" на традиционной международной авиационной выставке в Фарнборо. В одиом из полетов "Уисп" отснял и передал на землю панораму выставки. В 1973 году серийные образцы "Уиспа" поступили на вооружение британской армии.
Как видите, пока столь интересный и перспективный вид вертолетной техники в капиталистичаских странах используется только в военных целях. А между тем сфера сугубо мирного применения винтокрылых роботов могла бы стать весьма обширной.