
| Convertawings Model A |  |
 |
|
| Convertawings Model A | |
|
|
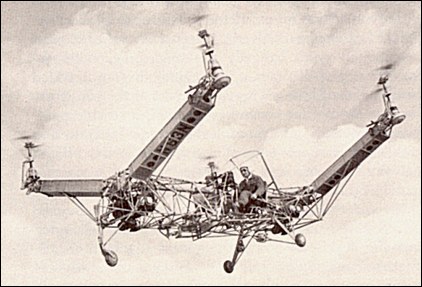
Convertawings has revived the concept tried out in 1922 in France by Oemichen, lift for whose helicopter was provided by four rotors, and by G. de Bothezat in the United States, with a double side-by-side arrangement of four rotors embodied in the first helicopter ordered by the United States Army, which flew in 1923. As the result of Convertawings' further developmental work on this configuration, a first prototype was completed in 1955 and it has since flown successfully. Two further helicopters on similar lines are also projected. The four rotors of this helicopter are mounted laterally on outriggers in two tandem pairs. The control mechanism is extremely simplified and obtained by differential change of thrust between the rotors. There is no cyclic control, but only collective control. In the experimental prototype the fuselage was of tubular steel, the booms supporting the rotors in aluminium alloy. Power is provided by two engines connected to the rotor drive system by multiple vee belts. Shafting and transmission cases ensure inter-connection between the four rotors, so that at need either engine can drive all of them. There is a tricycle undercarriage with two wheels in the rear section and a nose wheel which can swivel. The first flights took place in March 1956. P.Lambermont "Helicopters and Autogyros of the World", 1958
In the United States, a significant multiple-rotor design was the four-rotor Quadrotor flown on Long Island in 1956 by its designer and test pilot, D.H.Kaplan. The four rotors were positioned in an "H" configuration, and the design incorporated simplified hubs with strap-mounted blades, a form of "hinge- less" rotor. Part of the appeal of multiple-rotor aircraft is that they can be designed to eliminate complex cyclic-pitch-control systems. Control in pitch and roll can be achieved with differential collective pitch between the rotors, and this system was used with marked success in the Quadrotor (a similar arrangement had also been used in the three-rotor "Air Horse"). The system was designed so that almost any combination of collective pitch changes could be introduced into the four rotors, thus varying the rotor thrust and yielding powerful control. For example, to roll the Quadrotor to one side, the pitch of both rotors on that side would be increased while the pitch of the two rotors on the other side was decreased. To achieve directional control (turning the ship to the right or left), the four rotor masts would be inclined slightly inward from the vertical, the two forward rotors tilted aft, and the two rear rotors forward. By varying the rotor thrust, forces could be produced that would yaw the aircraft around its vertical axis. Despite successful testing and development, military support for the Quadrotor ceased after cutbacks in defense spending. However, the design - particularly its control system - was a precursor of current experimental vertical-rising aircraft designs that incorporate tandem wings or a square configuration of four fans, ducts, or jets. C.Gablehouse "Helicopters and Autogiros", 1969 * * *
|