|
|
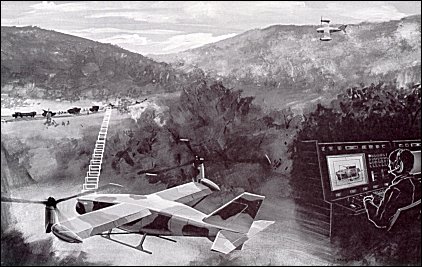
In 1986, Bell and Boeing decided to spend $700,000 of internal research and development funds to build a tilt-rotor RPV weighing less than one per cent of the V-22 "Osprey" on which it was to be patterned. Thanks to the vertical take-off and landing mode, this unmanned vehicle could carry more delicate loads than conventional RPVs. It could cruise at high speeds, loiter in an orbital pattern and hover for hours over a fixed position. Also the risks of damaging the RPV during recovery are far lower. The power-plant chosen for the Pointer was a 95hp Suzuki snowmobile engine due to its light weight. Boeing constructed the fuselage and flight-control system and Bell built the propeller/rotors and drive system. The "Pointer" is of all-composite construction.
The "Pointer", which made its first public appearance at Farnborough in September 1988, flew for the first time at the end of November 1988. A.J.Pelletier "Bell Aircraft since 1935", 1992
| Technical data for Bell "Pointer"
Wingspan, spinner centerlines: 3.25m,
width, blades turning: 5.61m,
length of fuselage: 4.06m,
height, top of spinner: 1.67m,
rotor diameter: 2.36m,
loaded weight: 250kg,
empty weight: 185kg,
maximum speed: 297km/h,
cruising speed: 260km/h,
hover ceiling in ground effect: 2750m,
hover ceiling outside ground effect: 2300m,
endurance: 7h,
combat radius: 185km
|
Warning: mysqli_connect(): php_network_getaddresses: getaddrinfo for mysql5.zone.ee failed: Name or service not known in /data03/virt15346/domeenid/www.aviastar.org/htdocs/helicopters_eng/bell_pointer.php on line 76
Fatal error: Uncaught mysqli_sql_exception: php_network_getaddresses: getaddrinfo for mysql5.zone.ee failed: Name or service not known in /data03/virt15346/domeenid/www.aviastar.org/htdocs/helicopters_eng/bell_pointer.php:76
Stack trace:
#0 /data03/virt15346/domeenid/www.aviastar.org/htdocs/helicopters_eng/bell_pointer.php(76): mysqli_connect('mysql5.zone.ee', 'd14657sa18989', Object(SensitiveParameterValue))
#1 {main}
thrown in /data03/virt15346/domeenid/www.aviastar.org/htdocs/helicopters_eng/bell_pointer.php on line 76
|